(모교소식) 이예솝 교수(로봇학부) 연구실 학부 연구생, 스마트 시티용 AI 카메라 기술 ‘TEDDY 프레임워크’ 개발
페이지 정보
작성자총동문회사무국 댓글 0건 조회 268회 작성일 25-03-20 11:39본문
이예솝 교수(로봇학부) 연구실 학부 연구생,
스마트 시티용 AI 카메라 기술 ‘TEDDY 프레임워크’ 개발
좌측부터 이예솝 교수, 양재민, 이종우 학생
모교 이예솝 교수(로봇학부) 연구실 학부 연구생들(양재민, 이종우)은 스마트 시티 및 실시간 감시 시스템을 위한 AI 기반 다중 카메라 추적 기술 ‘TEDDY 프레임워크’를 개발했다. 이 프레임워크는 전력 소모를 최대 20% 절감하면서도 기존 기술과 동등한 수준의 목표 추적 성능을 유지할 수 있어 스마트 시티 감시 시스템, 긴급 차량 교통관제, 공장 안전 모니터링 등 다양한 분야에서 활용될 수 있을 것으로 기대된다. 연구팀은 해당 연구 결과를 논문으로 작성해 국제 저명 학술지(Applied Sciences, SCIE)에 게재되는 성과를 거두었다.
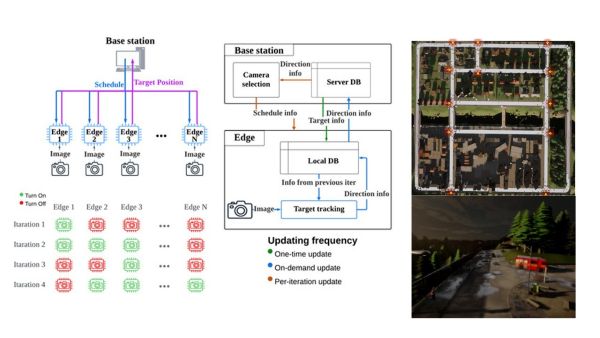
TEDDY(Trajectory-Enhanced Dynamic Device Yield) 프레임워크는 에지(Edge) 기반 스마트 카메라 네트워크에서 목표의 이동 경로를 예측하고 해당 경로에서 목표를 가장 잘 포착할 수 있는 카메라만 활성화하는 방식을 적용했다. 기존의 다중 카메라 추적 시스템은 모든 카메라를 항상 활성화해 데이터를 처리하거나 복잡한 AI 학습 모델을 사용해 높은 연산 비용이 소요되는 한계가 있었다. 이에 연구팀은 TEDDY 프레임워크를 통해 불필요한 연산을 줄이고 전력 소모를 최소화하면서도 실시간 목표 추적이 가능하도록 최적화했다.
연구팀은 TEDDY 프레임워크의 성능을 검증하기 위해 두 가지 실험을 진행했다. 첫 번째 실험에서는 실내 환경에서 단일 객체(사람)의 이동 경로를 추적하며 TEDDY가 기존 방식보다 연산량을 20% 이상 줄이면서도 동일한 정확도를 유지하는 것을 확인했다. 두 번째 실험에서는 스마트 시티에서 구급차와 같은 긴급 차량이 이동하는 시나리오를 가정하고 TEDDY를 적용한 결과 기존 시스템 대비 90% 이상의 연산량 감소 효과를 보이며 실시간 목표 추적이 가능함을 입증했다.
본 연구를 통해 개발된 TEDDY 프레임워크는 스마트 시티, 교통관제, 보안 감시 등 다양한 분야에서 실용적으로 적용될 수 있다. 기존 다중 카메라 추적 시스템의 문제점인 높은 연산 비용과 전력 소모, 중앙 서버 의존성을 해결함으로써, 보다 효율적이고 실시간 처리가 가능한 에지(Edge) 기반 목표 추적 시스템을 제공할 수 있다. 특히, TEDDY 프레임워크는 목표의 이동 경로를 예측하여 가장 적합한 카메라만 활성화하는 동적 자원 관리 기법을 적용함으로써, 기존 시스템 대비 연산량을 최대 90%까지 줄이면서도 동일한 추적 정확도를 유지하는 것이 확인되었다. 이를 통해 에너지 효율성이 중요한 스마트 시티 환경에서 긴급 차량 교통 관리, 범죄자 추적, 공장 내 안전 모니터링, 군사 감시 시스템 등과 같은 분야에서 실질적인 성능 향상을 기대할 수 있다.
본 연구는 광운대학교의 지원(2024)으로 수행되었으며 연구 결과는 국제 저명 논문지인 (Applied Sciences, Engineering분야 Q1)에 ‘The TEDDY Framework: An Efficient Framework for Target Tracking Using Edge-Based Distributed Smart Cameras with Dynamic Camera Selection’라는 제목으로 게재되었다.
출처 : 광운대학교 최신연구성과 (kw.ac.kr)
댓글목록
등록된 댓글이 없습니다.